Emulando aranhas e insetos e usando canudos de beber como base, uma equipe de pesquisa de Harvard desenvolveu um tipo de robô semi-mole capaz de se levantar, caminhar e até mesmo transpor uma superfície líquida. Diga oi para os “arthrobots”.
Em um esforço para criar robôs mais ágeis, George White e Alex Nemiroski, da Universidade de Harvard, decidiram fazer máquinas que se movem como aracnídeos e insetos. Essas criaturas estão entre as mais ágeis do planeta, sendo capazes de se mover rapidamente, escalar vários objetos e desempenhar manobras físicas que robôs pesados e convencionais simplesmente não conseguem. Quando se tratou dos materiais de construção, no entanto, os pesquisadores se viraram para algo muito menos natural: o modesto canudo de beber.
“Tudo isso começou com uma observação que George fez, de que tubos de polipropileno têm uma proporção excelente de força por peso. Isso abriu as portas para a criação de algo que tem mais suporte estrutural do que os robôs puramente moles têm”, disse Nemiroski, antigo membro pós-doutorado no laboratório de Harvard de Whitesides, em um comunicado. “Essa foi a base, e então nos inspiramos nos artrópodes para descobrir como fazer uma articulação e como usar os tubos como um exoesqueleto. Dali em diante, foi uma questão de ‘o quão longe sua imaginação pode ir?’ Uma vez que você tem uma peça de Lego, que tipo de castelo você pode construir com ela?”
Para criar as articulações, os pesquisadores cortaram entalhes em canudos espessos de raspadinha, permitindo-lhes que dobrassem. Um comprimento curto de tubos de borracha foi então inserido dentro dos canudos e, quando inflados, esses tubos forçavam as articulações a se estenderem. Um tendão de borracha também foi acoplado em cada lado, permitindo à articulação retrair quando os tubos estivessem desinflados. Os detalhes desse trabalho agora podem ser encontrados no periódico Soft Robotics.
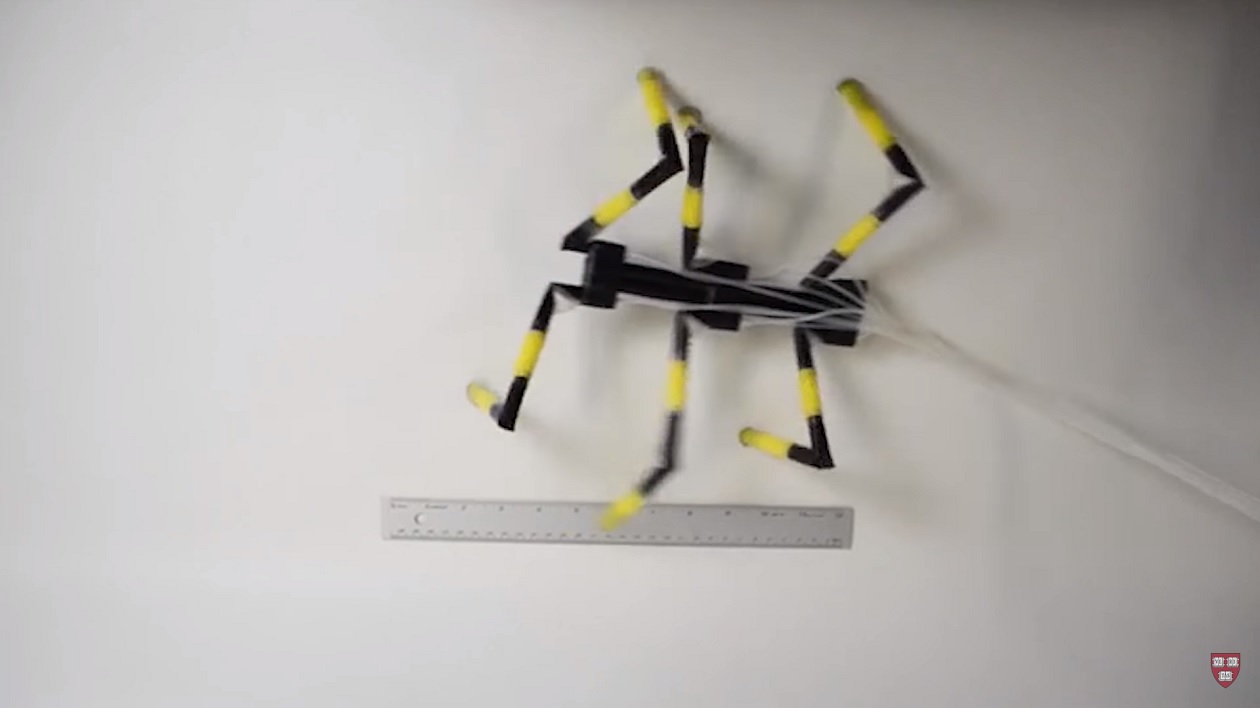
Usando esse conceito enganosamente simples, White e Nemiroski criaram um robô básico, de uma perna, capaz de rastejar. Obtendo sucesso, eles avançaram para versões de duas e três pernas, até finalmente chegar a um limite, com um robô de oito pernas.
Inicialmente, os pesquisadores usaram uma seringa simples controlada à mão para bombear ar para as articulações, mas, conforme os projetos ficaram mais complicados, tiveram que contar com computadores para controlar a taxa de inchação e o sequenciamento dos membros. Ir além desse ponto exigiria novos materiais e um paradigma diferente para controlar os movimentos de perna.
Eventualmente, versões mais refinadas desses robôs poderiam ser usadas na vigilância, ou durante operações de busca após desastres naturais. Os arthrobots podem não ser as máquinas mais resistentes, mas são baratos, eficazes e fáceis de se construir. Indo direto ao assunto, eles são maravilhosamente descomplicados.
fique por dentro das novidades giz
Inscreva-se agora para receber em primeira mão todas as notícias sobre tecnologia, ciência e cultura, reviews e comparativos exclusivos de produtos, além de descontos imperdíveis em ofertas exclusivas