Inspirados na tradicional arte japonesa do origami, os robôs auto-dobráveis podem ir a lugares e fazer coisas que os robôs tradicionais não conseguem. Uma enorme desvantagem desses dispositivos, no entanto, vinha sendo a necessidade de equipá-los com baterias ou fios. Agora, pesquisadores de Harvard descobriram uma nova maneira de superar esse problema, desenhando robôs dobráveis que podem ser controlados usando um campo magnético sem fio.
Os robôs dobráveis são uma versão descolada da fabricação ou “impressão” robótica sob demanda, em que os usuários podem enviar uma versão previamente dobrada de seu dispositivo para um ambiente de outra forma inacessível ou difícil de alcançar, tendo o objeto então dobrado em sua configuração física desejada. Depois disso, então, ele pode desempenhar um trabalho útil. O problema é que os robôs-origamis mais complexos até agora exigiam baterias e fios, o que os tornava robustos, pesados e biologicamente perigosos.
De fato, uma das possibilidades mais empolgantes dos robôs auto-dobráveis é o seu potencial uso na medicina. No futuro, cirurgiões poderiam enviar um robô-origami minúsculo para dentro do corpo, onde ele poderia se desdobrar e executar alguma tarefa médica, como a entrega direcionada de medicamento. A presença de fios e baterias apresenta um obstáculo óbvio, e é por isso que uma equipe de pesquisadores do Wyss Institute for Biologically Inspired Engineering e a Escola de Engenharia e Ciências Aplicadas John A. Paulson, da Universidade de Harvard, decidiram criar um robô auto-dobrável sem fio alimentado por fonte externa.
Cientistas já desenvolveram robôs-origamis e designs auto-dobráveis que não exigem baterias ou fios, mas essas criações eram bastante básicas. Os novos robôs dobráveis são um pouco mais complexos em termos de forma e função potencial.
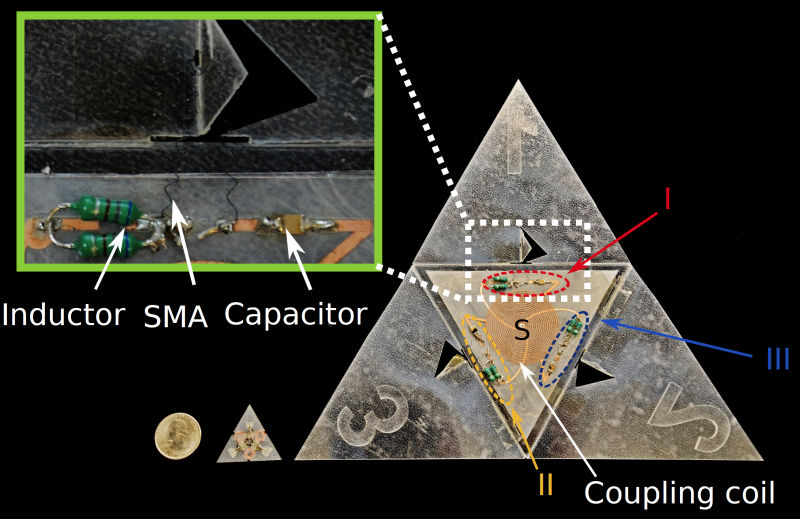
Liderados pelo roboticista Mustafa Boyvat, os pesquisadores projetaram e demonstraram vários sistemas, incluindo um robô tetraédrico plano do tamanho de uma moeda (um padrão esférico de origami de seis barras) e um robô feito de papel dobrado que cabe na mão.
Para fazer essas coisas se moverem sem baterias, os pesquisadores instalaram duas estruturas em suas articulações: bobinas de metais com memória de forma, que fazem o robô voltar à sua forma original quando aquecido, e circuitos em miniatura que se energizam quando atingem variados níveis de frequências de ressonância magnética.
Ao mudar as frequências, os robôs poderiam dobrar suas articulações sob demanda e de forma independente uns dos outros. Eles até conseguiram dobrar múltiplas articulações simultaneamente ao expor os robôs a frequências eletromagnéticas sobrepostas. A equipe demonstrou os múltiplos graus de liberdade em escalas de centímetros e milímetros. Essa pesquisa está agora na Science Robotics.
Imagem: Wyss Institute at Harvard University
“Como o origami, um dos principais pontos do nosso design é a simplicidade”, apontou o coautor Je-sung Koh, em um comunicado. “Esse sistema exige apenas componentes eletrônicos passivos básicos no robô para conduzir uma corrente elétrica — a estrutura do robô, por si só, toma conta do resto.”
Os pesquisadores conseguiram mover e desdobrar os dispositivos sem qualquer contato físico e enquanto os robôs estavam fora de alcance visual.
“Acreditamos que essas demonstrações ilustram a viabilidade de coleções de dispositivos e robôs-origamis abastecidos e controlados sem fio”, apontaram os autores no estudo. “Um uso potencial envolve dispositivos médicos inspirados em origamis operando remotamente dentro do corpo humano sem a necessidade de armazenamento de energia ou eletrônicos de controle.”
Nessa linha, os pesquisadores vislumbram um robô dobrável e que se pode engolir, podendo assim substituir uma endoscopia invasiva. Tal máquina poderia se mover e realizar tarefas simples, como segurar tecido ou registrar vídeos. De maneira animadora, o design altamente escalável vai permitir tanto versões menores como maiores.
“Ainda tem espaço para a miniaturização”, disse Boyvat. “Não achamos que chegamos ao limite de quão pequenas essas coisas podem ser e estamos animados para desenvolver ainda mais os nossos designs, para aplicações biomédicas.”
Olhando adiante, os pesquisadores planejam fazer experimentos com robôs de diferentes tamanhos e configurações físicas, além de trabalhar com diferentes intervalos de frequência. Quanto ao robô dobrável que pode assumir a aparência de um cisne de origami, a linha do tempo de desenvolvimento é mais incerta.
fique por dentro das novidades giz
Inscreva-se agora para receber em primeira mão todas as notícias sobre tecnologia, ciência e cultura, reviews e comparativos exclusivos de produtos, além de descontos imperdíveis em ofertas exclusivas