
Engenheiros da Universidade de Cambridge, no Reino Unido, demonstraram uma mão robótica de baixo custo que pode agarrar objetos. No vídeo divulgado pelos pesquisadores, o robô consegue pegar um pêssego sem deixá-lo cair.


Na prática, pegar objetos é algo trivial para humanos, mas um grande problema de engenharia para robôs. Os engenheiros precisam desenvolver hardware e software que possibilite a uma mão robótica ter a destreza e adaptabilidade necessárias para segurar coisas.
A maioria dos robôs avançados de hoje em dia ainda não são capazes de manipular objetos da mesma maneira que uma criança faz com facilidade.
Pegar um ovo, por exemplo, é um problema: força demais faria ele quebrar, enquanto pouca força o faria cair. Além disso, para uma mão robótica funcionar, ela precisa de motores independentes para a articulação de cada dedo, o que requer uma quantidade significativa de energia.
Em um novo estudo publicado na Advanced Intelligent Systems, os pesquisadores britânicos conseguiram resolver esses problemas. Desenvolveram uma mão robótica que pode agarrar uma variedade de objetos com a quantidade correta de pressão e usando mínima energia.
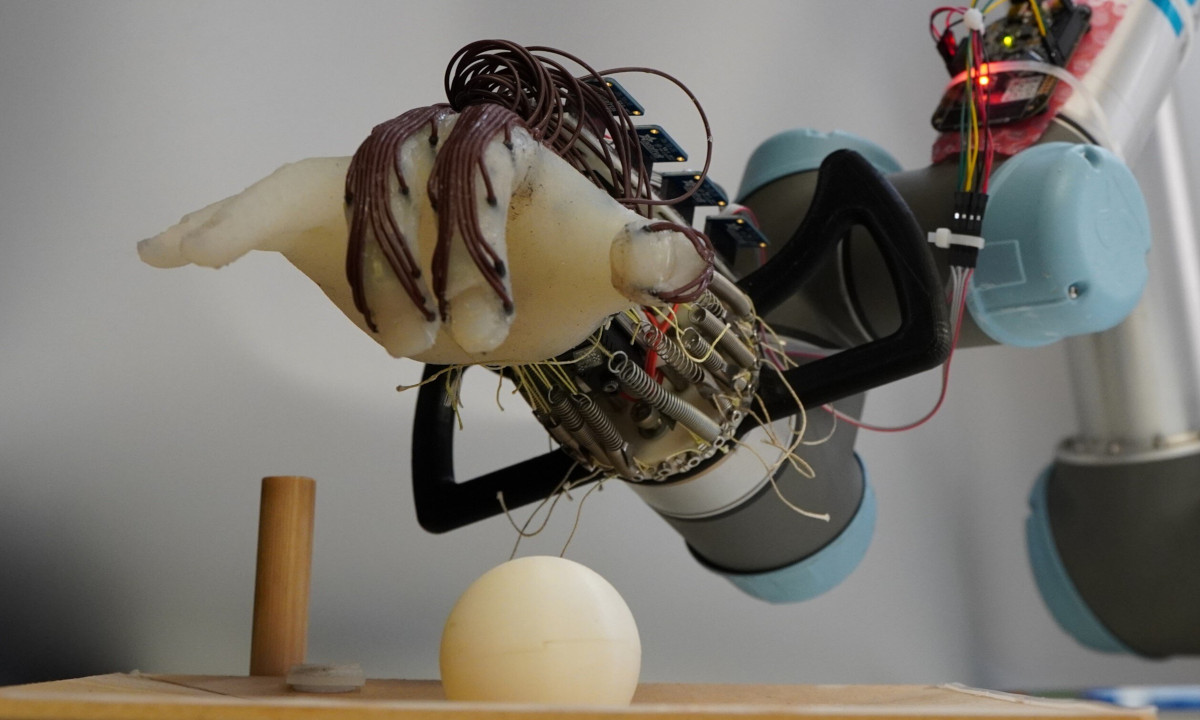
Para baratear os custos, eles usaram técnicas de impressão 3D, tornando os sistemas mais simples e eficientes. A mão também conta com sensores táteis, para que ela pudesse “sentir” o que estava tocando.
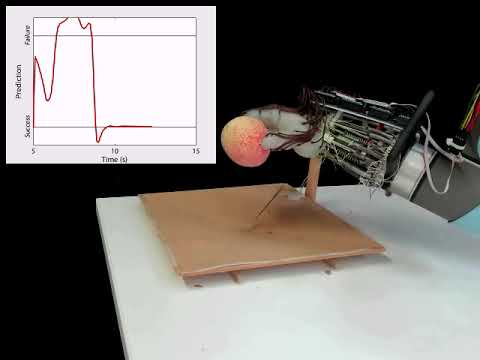
“Os sensores dão ao robô uma noção de quão bem a aderência está indo, então ele sabe quando está começando a escorregar. Isso ajuda a prever quando as coisas vão falhar”, explica Kieran Gilday, o principal autor da pesquisa, em comunicado.
Por enquanto, a mão impressa em 3D não pode mover seus dedos independentemente, mas ainda pode realizar uma série de movimentos. Apesar da forma desajeitada, a mão consegue pegar uma fruta usando apenas o movimento do pulso, como pode ser visto no vídeo abaixo:
Foram 1.200 testes
Ao todo, a equipe precisou realizar mais de 1.200 testes para que o robô aprendesse a agarrar os objetos. Além do pêssego, a mão tentou pegar outros objetos como, bolas de plástico, mouse de computador ou um rolo de plástico-bolha. Nesses testes, a mão conseguiu agarrar com sucesso 11 dos 14 objetos.
Por ter um design mais simples, ela possui um pequeno número de sensores, sendo mais fácil controlar a mão. Além disso, ele oferece uma ampla variedade de movimentos, o que agiliza o processo de aprendizado.
O próximo passo da pesquisa é adicionar mais recursos computacionais, para que o robô explore mais sobre o seu ambiente. Isso permitirá que ele aprenda a pegar uma gama maior de objetos.