
Quem tem medo da revolução das máquinas vai ficar ainda mais assustado com a nova invenção dos engenheiros do ETH Zurich (Instituto Federal de Tecnologia de Zurique), na Suíça. Eles criaram um “robô aranha” que é capaz de subir paredes e, até mesmo, andar no teto, com a mesma maestria de uma largatixa.


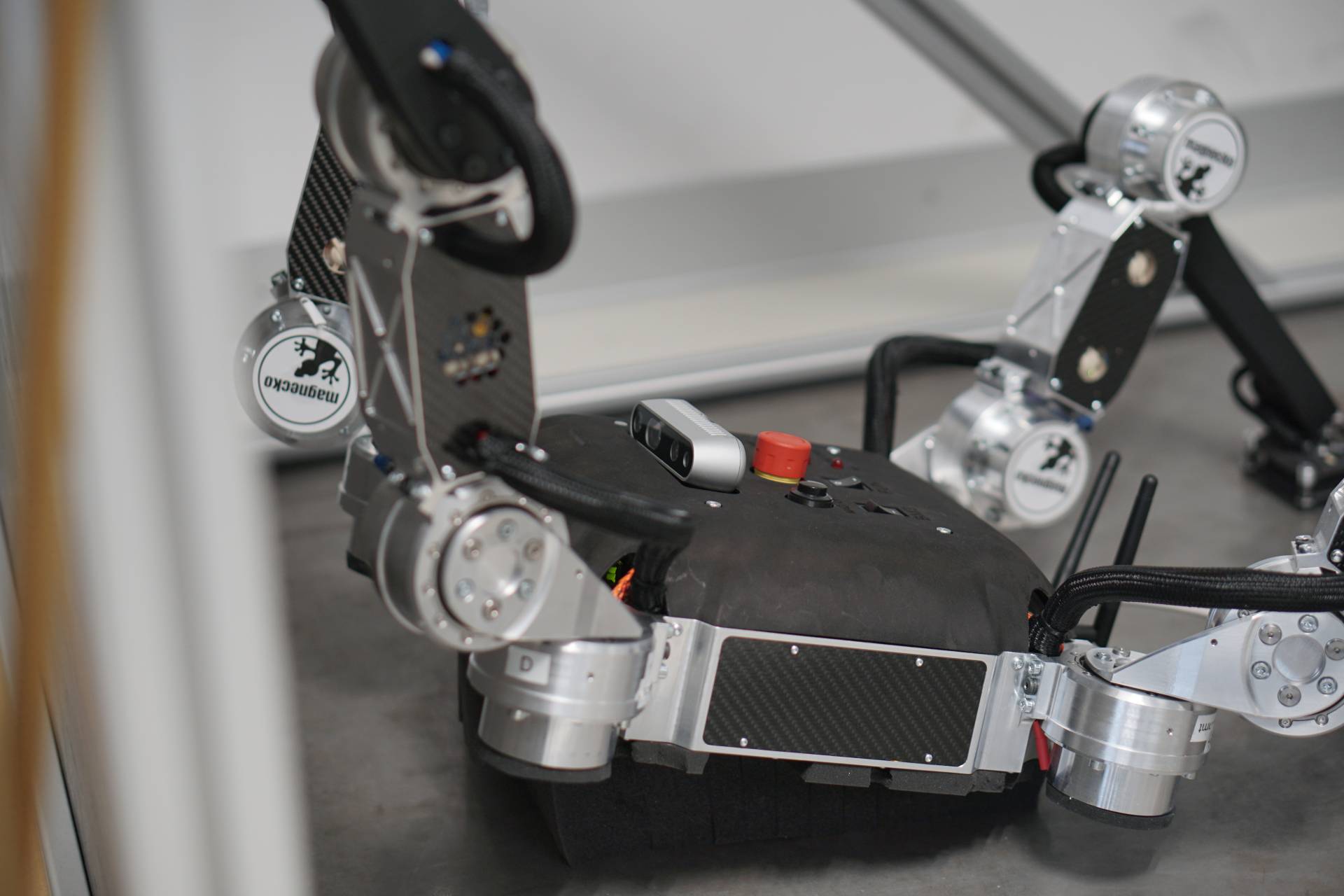
Magnecko é um robô inspirado na forma como aranhas e lagartos se locomovem para buscar suas presas. Ele foi desenvolvido para ambientes industriais e marítimos.
Os pesquisadores explicam que esse tipo de ambiente demanda uma máquina que consiga se equilibrar e superar obstáculos facilmente. “Isso não é viável para ferramentas como drones, devido à sua instabilidade inerente e curto tempo de execução. Nosso robô Magnetko foi projetado para atender a essas restrições”, disse o grupo de pesquisa em um comunicado. Confira no vídeo:

Como o robô funciona
O Magnecko usa imãs em cada um dos seus quatro pés para se locomover de forma eficiente. Através desta tecnologia, o robô é capaz de ultrapassar obstáculos em superfícies de ferro.
Além disso, em cada um dos pés, o Magnecko consegue suportar até 2,5 vezes o peso do robô. “Nosso objetivo é desenvolver uma plataforma de movimento altamente versátil para aplicações de escalada em ambientes industriais”, completou o grupo.
Para se tornar ainda mais versátil, o robô tem ainda a capacidade de usar vários sensores ou acessórios.
Outras maquinas
O Magnecko não é o único robô que tem chamado a atenção do público. No último mês, a NASA apresentou o seu primeiro robô bípede que pode viajar até a Lua. O projeto vem sendo desenvolvido desde 2013 em parceria com o Centro Espacial Johnson, vinculado à agência.
O robô recebeu o nome de Valkyrie. Segundo a NASA, ele tem potencial de contribuir com o programa Artemis no futuro.
De acordo com a NASA, testar o robô — que tem 1,8 metros de altura e pesa 125 kg — contribuirá para o desenvolvimento da robótica e automação para uso no espaço. A agência espera aplicar o conhecimento adquirido para “acelerar o amadurecimento da tecnologia robótica” aqui na Terra e em futuras missões espaciais em Marte, por exemplo.
A ideia é melhorar as ferramentas de controle remoto e desenvolver robôs de exploração totalmente autônomos, já que o atraso na comunicação entre a Terra e Marte dificulta o controle em tempo real dessas máquinas.