Home › Espaço › O belo videogame que controla o Curiosity, da NASA, em Marte
O belo videogame que controla o Curiosity, da NASA, em Marte
Então o Curiosity do MSL aterrissou. O robô sobreviveu aos sete minutos de terror e tocou com segurança a superfície de Marte. Um milagre por si só. Agora que ela está lá, precisa se mover para todos os lados. Qualquer um que já tenha jogado Lunar Lander e Moon Patrol já sabe como eles farão […]
Então o Curiosity do MSLaterrissou. O robô sobreviveu aos sete minutos de terror e tocou com segurança a superfície de Marte. Um milagre por si só. Agora que ela está lá, precisa se mover para todos os lados. Qualquer um que já tenha jogado Lunar Lander e Moon Patrol já sabe como eles farão isso: com video games.
Brian Cooper é o piloto chefe do Curiosity e quem escreveu o software para dirigi-lo. Mas isso não é tudo — ele escreveu o software de controle para todos os veículos que já foram enviados a Marte. Entre Sojourner, Spirit, Opportunity e agora o Curiosity, Cooper também é a única pessoa que já dirigiu cada um deles. Dirigir, nesse sentido, não significa apenas mover o veículo de um local para outro — o piloto controla tudo que se move. O braço, as brocas, tudo. Mas dirigir o Curiosity é diferente de todos os anteriores. é muito melhor.
Para começar, o Curiosity tem um monte de câmeras estereoscópicas, o que significa que ele enxerga em 3D. Isso não serve apenas para que tenhamos uma visão bem mais maluca do planeta vermelho, mas sim que o veículo é capaz de gerar mapas tridimensionais da área ao seu redor, preenchendo-o com superfícies e texturas. Esse nível de detalhes melhoria bastante a capacidade de evitar perigos do veículos, tirando um pouco da pressão dos pilotos humanos para que fiquem atentos a problemas com os quais já tiveram que lidar no passado.
O veículo anterior, Opportunity, ficou preso em um ponto numa duna chamado Purgatório. O problema era que como ele não verificava visualmente se estava progredindo, não sabia que tinha ficado preso. As rodas deram os giros que se supunha eram necessários para chegar ao destino almejado do dia, que era 200 metros à frente. Isso fez com ele cavasse um buraco mais e mais fundo onde o próprio ficou. Foi bastante difícil para os engenheiros recolocar o Opportunity de volta ao solo rígido. Algo similar ocorreu ao Spirit e quando ele finalmente conseguiu sair, apresentou alguns danos significativos. O Curiosity, por outro lado, tem a inteligência para saber quando se depara com um problema desse tipo, é capaz de parar antes que seja muito tarde e, então, esperar um novo conjunto de ordens.
Os humanos no Laboratório de Propulsão a Jato têm um papel na segurança do veículo, claro. Os 14 pilotos do rover (o título oficial é “estrategistas do rover”) têm que coordenar as atividades diárias com antecedência. A comunicação entre a Terra e o Curiosity acontece apenas duas vezes por dia e existe um delay significativo entre o envio do comando e o recebimento dele em Marte — cerca de 14 minutos.
“Podemos enviar comandos de baixo nível como ‘gire o motor a 100 rotações,'” diz Matt Heverly, outro estrategista. “Ou podemos enviar comandos de alto nível, como ‘vá às coordenadas pré-determinadas e mantenha-se a salvo.'”
A janela para comunicação depende da orientação de Marte. Pelo menos nos primeiros 90 dias, a equipe trabalhará durante os dias marcianos, conhecidos como “sols”. A rotação de Marte é apenas um pouco mais lenta que a da Terra, então para manter o relógio sincronizado a cada manhã marciana, os estrategistas terão que ir trabalhar 40 minutos mais tarde a cada dia. Ao fim do dia marciano, o veículo envia os dados e imagens mais recentes, então ele tira a noite para descansar. Nesse meio tempo, os estrategistas se ocupam para bolar a rota do dia seguinte.
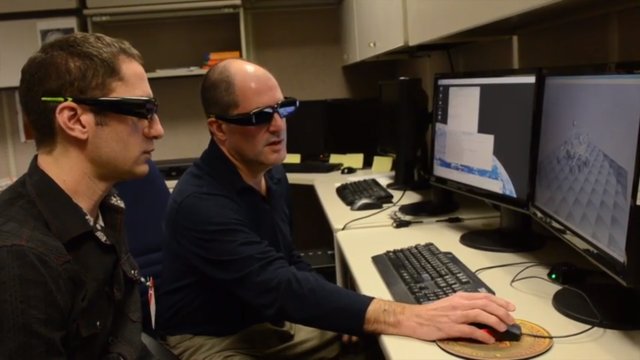
Usando o software que Cooper e sua equipe desenvolveram, combinado com dados visuais que o Curiosity coletou, os estrategistas podem rapidamente percorrer uma grande variedade de rotas para levar o veículo aonde a equipe de ciência deseja. O robô de verdade só viaja 160 metros por hora, mas na simulação, usando apenas alguns comandos básicos de teclado e mouse, os estrategistas podem levá-lo para obstáculos para ver como ele potencialmente se sairia. Eles podem vestir óculos 3D para ver o terreno com uma ideia de escala e distância. Então eles planejam o que aparenta ser a melhor rota, enviam os comandos e passam o bastão para a inteligência do veículo em improvisar uma maneira de chegar até lá.
Em um planeta com penhascos súbitos e buracos onde caberia uma montanha, enviar as direções mais simples requer um planejamento e programação críticos. Cooper parece confiante. Mas, como ele diz, “você nunca sabe o que irá encontrar.”
Sinceros agradecimentos a Brian Cooper e sua equipe.
***
O Space Campo é sobre o lado menos explorado da NASA. De robótica à medicina, passando por telescópios que exploram o espaço profundo à arte. Nessas duas semanas falaremos diretamente do JPL e Ames, da NASA, jogando uma luz nesse maravilhoso mundo.
Vídeo por Judd Frazier, editado por Michael Hession. Vídeo de simulação por NASA JPL.
Agradecimentos especiais a Mark Rober, Jessica Culler, Dan Goods, Val Bunnell e todos no JPL e Ames, da NASA, por fazer isso acontecer. A lista de agradecimentos ficaria enorme, mas por nos dar acesso e serem tão generosos com seu tempo, somos extremamente gratos a todos aqui.
Space Camp® é uma marca/serviço registrado do Centrl de Foguetes e Espaço dos EUA. Este artigo e publicações subsequentes não foram escritas ou endossadas pelo Centro de Foguetes e Espaço dos EUA ou pelo Space Camp®. Para vistar o site oficial do Space Campo, clique aqui.
fique por dentro das novidades giz
Inscreva-se agora para receber em primeira mão todas as notícias sobre tecnologia, ciência e cultura, reviews e comparativos exclusivos de produtos, além de descontos imperdíveis em ofertas exclusivas