Com este robô, estamos um passo mais próximos de um futuro com Transformers
O caminho em direção a robôs humanoides capazes de se transformarem em caminhões, dinossauros e aviões agora está um pouco mais curto, graças à invenção de um robô modular que consegue alterar sua forma física de acordo com as necessidades de uma dada situação. • Fórum Econômico Mundial prevê que robôs farão mais tarefas que humanos […]
O caminho em direção a robôs humanoides capazes de se transformarem em caminhões, dinossauros e aviões agora está um pouco mais curto, graças à invenção de um robô modular que consegue alterar sua forma física de acordo com as necessidades de uma dada situação.
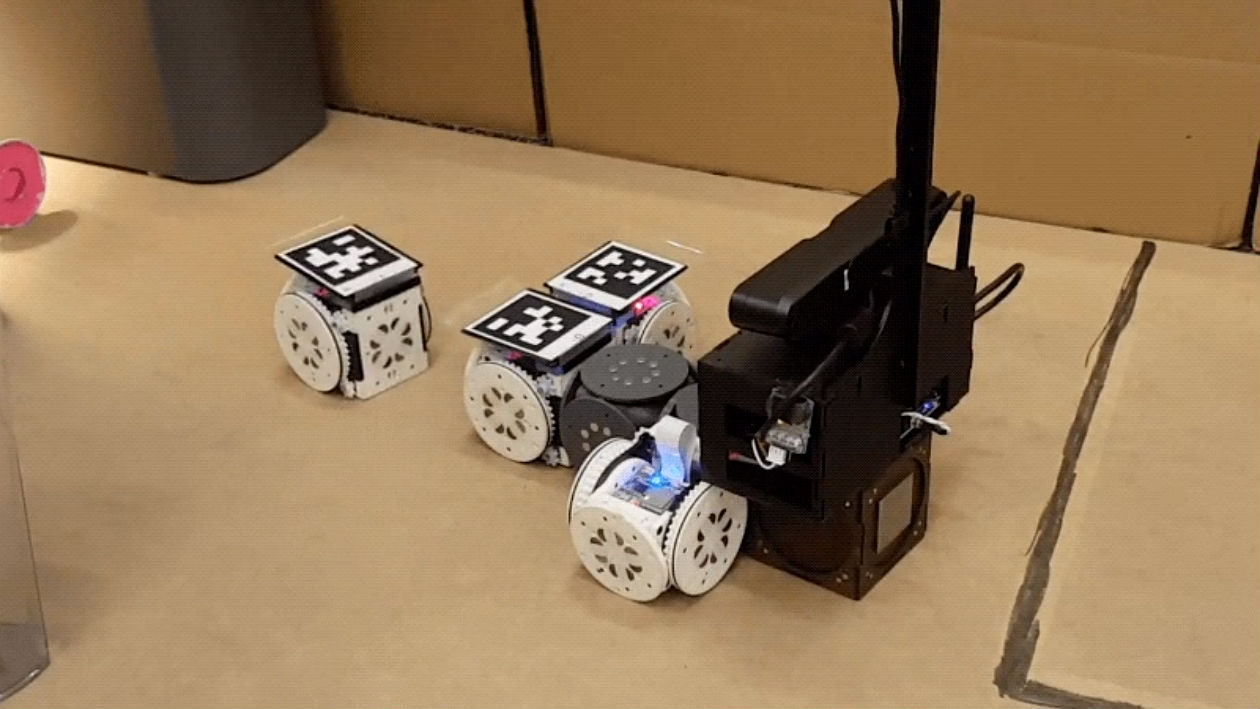
Apresentamos o MSRR, um “robô autorreconfigurável modular” projetado e construído por pesquisadores da Universidade Cornell e da Universidade da Pensilvânia. O sistema é capaz de alterar sua forma física para atender às demandas de uma tarefa específica, mesmo em ambientes anteriormente desconhecidos. Para funcionar, o sistema combina ferramentas poderosas de percepção com capacidades de planejamento de alto nível e um hardware modular. Os detalhes do MSRR foram publicados nesta quinta-feira (1), na Science Robotics.
Um dos módulos do sistema MSRR. Imagem: Tarik Tosun
Quando o MSRR é colocado em um novo ambiente e recebe uma tarefa, como pegar lixo ou enviar uma carta, a primeira coisa que ele faz é criar um mapa dos arredores. Uma vez orientado, o sistema decide se uma transformação física é necessária para cumprir seu objetivo, como se transformar em um robô parecido com uma cobra para subir um lance de escadas ou formar um braço alongado para passar por um corredor estreito.
O sistema é composto por vários módulos móveis. Cada módulo pode se separar da estrutura maior, reorientar sua posição e se encaixar novamente na superestrutura no local desejado. Ao deslocar suas partes dessa maneira, o MSRR consegue alterar sua função, suas capacidades de locomoção e sua forma. O hardware modular é controlado e coordenado pelo “cérebro” central do sistema.
Ele ainda é muito básico, mas versões refinadas e ampliadas poderiam ser usadas para navegar em situações imprevisíveis e perigosas.
“Duas importantes aplicações futuras são a busca e o resgate e o descarte de bombas”, disse Jonathan Daudelin, principal autor do novo estudo e roboticista da Universidade Cornell, em entrevista ao Gizmodo. “Essas duas áreas envolvem condições ambientais amplamente variáveis e desconhecidas que são adequadas para as capacidades adaptativas dos robôs modulares. Além disso, danos sofridos por robôs modulares podem ser reparados mais facilmente, simplesmente substituindo os módulos danificados em vez do robô inteiro.”
MSRR na configuração Escorpião. Imagem: Tarik Tosun
Para ajudar na navegação em torno do ambiente, o sistema MSRR é equipado com várias ferramentas de percepção. Cada módulo destacável tem uma câmera 3D capaz de medir a distância para cada pixel na imagem usada. Um pequeno computador processa os dados e controla os movimentos gerais coletivos do robô. Usando dados de câmera, o sistema constrói um mapa 3D do ambiente do robô à medida que ele se mexe e acompanha a localização do robô dentro do mapa.
“Como o nosso sistema é projetado para funcionar em ambientes desconhecidos, usamos um algoritmo de exploração para dizer ao robô para onde ele deve se mover para explorar partes não vistas do ambiente”, disse Daudelin. “Conforme o robô explora, ele detecta objetos coloridos relacionados à sua tarefa e registra suas posições. Uma outra ferramenta de percepção analisa a vista 3D do ambiente que o robô tem para classificar o tipo de condições nos arredores. Por exemplo, se o robô vê um objeto que precisa ir buscar, ele determina se o objeto está em uma área livre, em um túnel estreito ou em uma borda.”
O planejador de alto nível, disse Daudelin, pode então usar essa informação para decidir se o robô precisa reconfigurar sua forma para pegar o objeto.
Além de suas ferramentas de percepção, o sistema contém uma biblioteca de possíveis configurações e ações, de forma que nenhum treinamento prévio é necessário. Atualmente, ele é equipado com quatro predefinições: Carro, Escorpião, Cobra e Probóscide. Com esses quatro tipos de “transformers”, ele consegue ter acesso a objetos e, em seguida, coletá-los, transportá-los e depositá-los no local desejado.
O sistema foi submetido a três testes distintos, nos quais ele manobrou em torno do ambiente, se transformou, reuniu objetos e até entregou uma carta. Em uma demonstração, por exemplo, ele teve que encontrar, pegar e entregar objetos metálicos cor-de-rosa e verdes a uma zona de entrega designada, que foi marcada com um quadrado azul. Foi assim que o sistema se saiu, conforme relatam os autores no novo estudo:
O ambiente de demonstração tinha dois objetos a serem buscados: uma lata de refrigerante verde em uma área desobstruída e um carretel de arame rosa em um vão estreito entre duas latas de lixo. Vários obstáculos foram colocados no ambiente para restringir a navegação. Ao executar a tarefa, o robô primeiro explorou usando a configuração “Carro”. Uma vez localizado o objeto rosa, ele reconheceu o ambiente ao redor como um tipo “túnel”, e o planejador de alto nível direcionou reativamente o robô para reconfigurar para o modo “Probóscide”, que foi usado para alcançar entre as lixeiras e puxar o objeto para fora. O robô então reconfigurou novamente para “Carro”, pegou o objeto e o deixou na zona de entrega que o sistema havia visto e marcado anteriormente durante a exploração.
Daudelin disse que o uso de múltiplos elementos robóticos trouxe muitos pontos de falha possíveis. Isso tornou mais importante para a equipe criar mais verificações e comportamentos robustos no sistema, para detectar e se recuperar de falhas durante uma missão, afirmou o autor principal do estudo.
“Como os módulos individuais são pequenos, eles não são muito potentes e, portanto, têm um conjunto muito restrito de capacidades e são altamente suscetíveis a pequenas falhas”, acrescentou Daudelin. “A computação também foi limitada, devido ao tamanho pequeno do módulo do sensor que contém o computador robô.”
Mais para a frente, Daudelin disse que sua equipe gostaria de dar aos módulos a capacidade de modificar seus ambientes para superar os obstáculos.
“Eu também pesquisei o uso de machine learning combinado com algoritmos de planejamento de caminho para permitir que robôs modulares percorressem terrenos difíceis de forma autônoma, reconfigurando suas formas conforme o necessário para ultrapassar obstáculos”, disse ele.
Obviamente, os roboticistas têm um longo caminho a percorrer antes que a visão de ficção científica de Transformers se transforme em realidade, mas essa pesquisa é um passo positivo nessa direção.
fique por dentro das novidades giz
Inscreva-se agora para receber em primeira mão todas as notícias sobre tecnologia, ciência e cultura, reviews e comparativos exclusivos de produtos, além de descontos imperdíveis em ofertas exclusivas