A DARPA tem o “Big Dog” para o transporte de cargas por robôs, mas não é a única nessa corrida. Um novo design do Instituto Italiano de Tecnologia lembra um pouco o concorrente, mas ele corre como uma Ferrari — ou, pelo menos, uma cabra dos Alpes mecânica. Liderado pelo Professor Darwin Caldwell, o time […]
A DARPA tem o “Big Dog” para o transporte de cargas por robôs, mas não é a única nessa corrida. Um novo design do Instituto Italiano de Tecnologia lembra um pouco o concorrente, mas ele corre como uma Ferrari — ou, pelo menos, uma cabra dos Alpes mecânica.
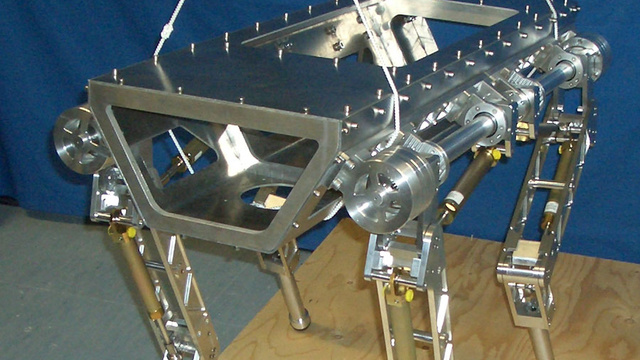
Liderado pelo Professor Darwin Caldwell, o time do departamento de robótica avançada do IIT gastou quase meia década desenhando, montando e testando o HyQ, um robô quadrúpede hidráulico de um metro e 70 kg. Sendo ativado hidraulicamente e construído de um alumínio levíssimo, o HyQ é um daqueles úteis robôs capazes de realizar correções instantâneas que o habilitam ao uso em terrenos irregulares. Ele tem 12 articulações ativas — oito hidráulicas e quatro elétricas — para gerar o torque necessário para ele se mover com agilidade em locais não planos. E cara… ele se move. Como você pode ver no vídeo de testes acima, o HyQ não só é capaz de subir ladeiras, trotando a 2 m/s e evitando obstáculos ativamente, mas também evitar obstáculos verticalmente, passando por cima de detritos nem que para isso seja preciso levantar suas “patas” traseiras (só faltou um caubói balançando o chapéu para o efeito ficar completo).
Para chegar a esse resultado, o HyQ confia em um sistema de force-feedback que monitora a pressão em cada pé e ajusta a flexibilidade de cada perna bombeando rapidamente fluído hidráulico para dentro ou fora dos atuadores. Essas pernas ativamente complacentes são a característica-chave do HyQ — bem como o seu design aberto. “O BigDog é uma caixa preta — ninguém sabe exatamente quais desenhos, materiais e controladoras eles estão usando,” disse Claudio Semini, pesquisador responsável pelo hardware do HyQ e membro-fundador do projeto, à IEEE. “Queremos fazer nosso design o mais aberto possível.” E, pelo visto, o mais atraente também. [Forbes – Engadget – Spectrum IEEE – IIT]
fique por dentro das novidades giz
Inscreva-se agora para receber em primeira mão todas as notícias sobre tecnologia, ciência e cultura, reviews e comparativos exclusivos de produtos, além de descontos imperdíveis em ofertas exclusivas