Já mostramos aqui no Gizmodo um robô que consegue se transformar em uma “cobra” para conseguir se locomover em lugares fechados ou de difícil acesso, como passagens menores e estreitas. Agora, cientistas da Universidade de Oslo, na Noruega, criaram um robô capaz de se adaptar a diferentes tipos de solos.
De acordo com a pesquisa publicada na Nature Machine Intelligence, o robô chamado de DyRET, que vem da palavra dyr (“animal” em norueguês), foi construído para conseguir caminhar em diferentes tipos de terrenos, incluindo aqueles mais desafiadores, como os rochosos, com desempenho mais eficiente quando comparado ao de um robô de corpo estático.
Funcionamento do quadrúpede
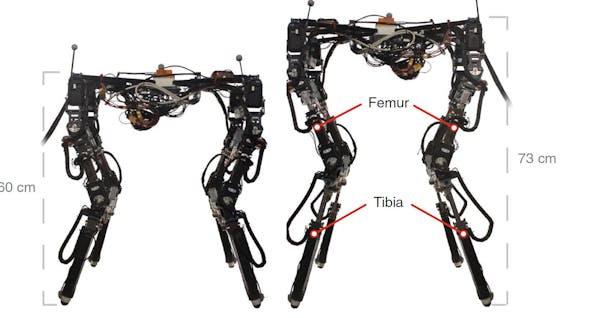
A partir de duas extensões telescópicas embutidas em cada uma de suas quatro pernas, é possível alterar o seu comprimento. Os ajustes são feitos por motores adaptados nas pernas e o comprimento pode ser alterado automaticamente enquanto o robô estiver em ação, podendo chegar a altura de 60 cm e 73 cm (como você pode conferir na foto abaixo).
Estas diferenças de altura fazem diferença na dinâmica e resultado da aplicação do robô. Com as pernas curtas, o DyRET se revela estável, apesar da lentidão de sua caminhada e apresenta um centro de gravidade baixo. Já em seu modo mais alto, com 13 cm a mais comparado a sua versão “hobbit”, o DyRET se torna instável enquanto caminha, contudo consegue dar passos maiores, fazendo com que sua locomoção seja mais rápida e o desvio de obstáculos mais facilmente resolvido.
O robô DyRET pode alterar a configuração de suas pernas para se adaptar a diferentes tipos de terreno. Foto: Tønnes Nygaard/Divulgação.
Ele também possui sensores para rastrear os seus passos e a dureza do solo, além de uma câmera 3D posicionada entre as pernas dianteiras do DyRET que indica o quão acidentado é o solo que o robô está sendo testado.
Diferentes adaptações
Foram realizados vários testes em diferente superfícies, de maneira a fazer com que robô pudesse saber o momento que precisa adaptar seu comprimento. De acordo com o documento publicado, ele caminhou dentro de espaços de cerca de 5 metros de comprimento contendo diferentes tipos de terrenos: areia, cascalho e telhas de fibrocimento duro.
A partir dos resultados obtidos nestes experimentos, foi possível começar a pensar nos seus mecanismos usando a ideia de “cognição incorporada”, em que o hardware de um robô consiga ser resolver problemas junto de seu software. Ou seja: em vez do DyRET ficar restrito apenas aos seus movimentos básicos, ele próprio consegue se adaptar e solucionar problemas em ambientes desafiadores.
Imagine a capacidade destes robôs e suas aplicações para descobertas científicas, especialmente aquelas que podem se encontrar em locais de difícil acesso aos humanos. Suspeito que futuramente algo de muito bom ainda possa surgir.
fique por dentro das novidades giz
Inscreva-se agora para receber em primeira mão todas as notícias sobre tecnologia, ciência e cultura, reviews e comparativos exclusivos de produtos, além de descontos imperdíveis em ofertas exclusivas